브러시드 Dc 서보 드라이버
제품 소개

1. 오브 모터 드라이버의 특징
1. 1. 빠른 응답
변화하는 부하 조건에 즉시 적응
고성능 패스트 기능 링
실시간 성능 피드백
1. 2. 안정적이고 호환되는
DSP 처리 작업은 보다 안정적이고 안정적입니다.
주류 타사 회전 및 직접 구동 모터와 완벽하게 호환
1. 3. 안전하고 신뢰할 수 있는
소음 및 추가 하드웨어 요구 사항 감소
전압, 전류 및 온도 모니터링을 통해 더 높은 신뢰성을 제공합니다.
2. 응용 프로그램 시나리오
브러시드 Dc Servo Driver는 CNC 공작 기계, 인쇄 장비, 포장 장비, 가공 장비, 자율 로봇, 자동 생산 라인 및 기타 분야에서 사용할 수 있으며 산업, 과학 연구, 금융, 병원 등과 같은 다양한 분야에서 다양한 요구를 충족시킵니다. 널리 응용 프로그램, 품질 보증, 큰 출하.
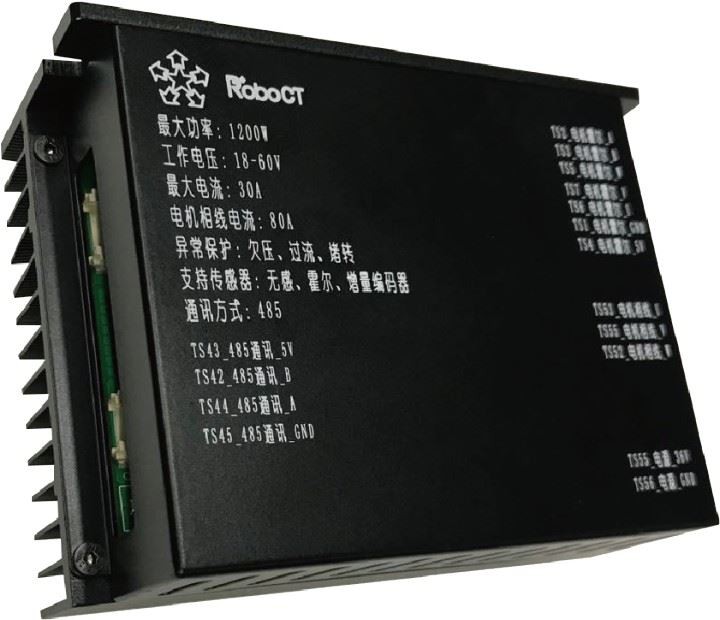
3. 매개 변수 테이블
매개 변수 | 브러시드 Dc 서보 드라이버 | 주문을 받아서 만들어진 |
크기 | 112.5*90mm | 주문을 받아서 만들어진 |
전압 | 18~60V | 18~60V |
컨트롤러 공급 전류 | 30a | 30a |
전원 | 1500w | <> |
지원 센서 | 홀, 증분 인코더 (4096 와이어를 지원할 수 있습니다) | 홀 없음, 홀, 증분 인코더 (4096 와이어를 지원할 수 있습니다) |
예외 보호 | 잠긴 로터, 저전압, 과전류 | 잠긴 로터, 저전압, 과전류 |
신호 통신 | 485 | CAN/485 |
위의 매개 변수는 참조용입니다. 당사의 제품 기술은 지속적으로 업데이트되고 업그레이드됩니다. 동시에 고객의 사용자 지정 및 개발도 받아들입니다.
4. 제품 세부 정보



5. 공장 및 자격




6. 지침 및 예방 조치
1. 모터 스톨
오류 이유: 속도 피드백의 극성이 잘못되었습니다.
1. 치료 방법 :
가능하면 위치 피드백 극성 스위치를 켜십시오.
1.To 다른 위치. (일부 드라이브는 할 수 있습니다)
2. 타코터를 사용하는 경우, 타치 + 및 타치를 드라이버에 전환합니다.
3. 인코더를 사용하는 경우 enca를 연결하고 드라이버에 encb를 연결합니다.
4. 홀 속도 모드의 경우, 드라이버에 홀-1과 홀-3을 전환한 다음 모터-A와 모터-b를 연결합니다.
2. 오류 이유 : 인코더 속도 피드백, 인코더 전원 공급 장치가 전원을 잃게됩니다.
처리 방법: 5V 인코더 전원 공급 장치를 확인하고 연결합니다. 전원 공급 장치가 충분한 전류를 공급할 수 있는지 확인합니다. 외부 전원 공급 장치를 사용하는 경우 전압이 운전자에게 신호를 보도록 합니다.
2. LED는 녹색이지만 모터는 움직이지 않습니다.
1. 결함 이유 : 하나 이상의 방향의 모터는 행동하는 것이 금지되어 있습니다.
처리 방법 : + 억제를 확인하고 포트를 억제합니다.
2. 오류 이유 : 명령 신호는 드라이버 신호 접지에 없습니다.
처리 방법: 명령 신호 접지를 드라이버 신호 접지와 연결합니다.
인기 탭: 브러시 드 DC 서보 드라이버, 중국, 제조 업체, 공급 업체, 도매, 사용자 정의, 높은 품질
문의 보내기